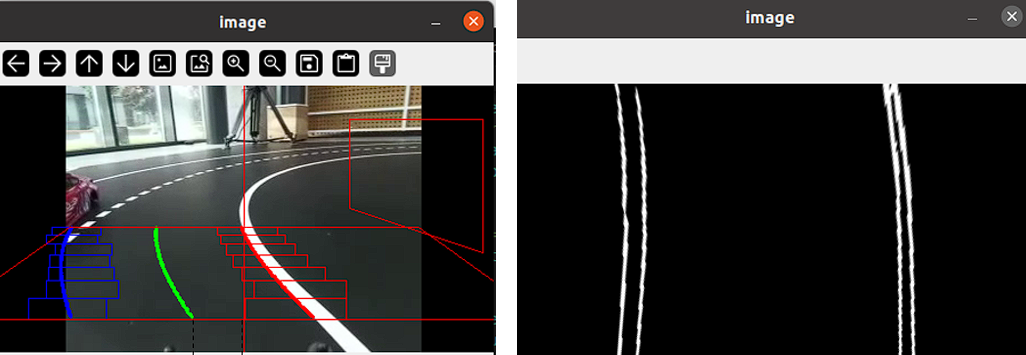
This control was mainly used in my bachelor’s degree project in order to adjust the angle of the servomotor so that the ego was situating itself in the middle of the road.
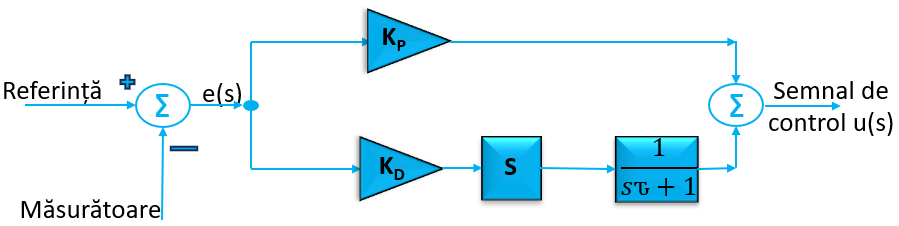
The proposed feedback loop is in the following picture:
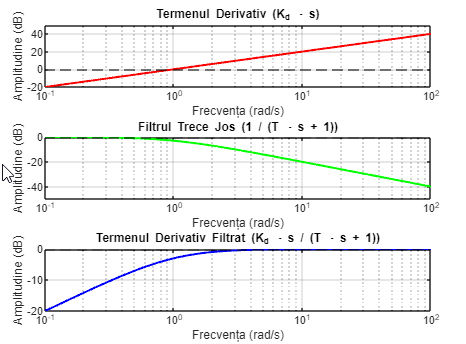
The Derivative term needed a Pass-Down Filter in order to make it implementable on a microcontroller because the derivative suggests the future (improper system). Of course, the pass-down filter adds a -20 [dB\dec] slope where the “s” term introduces a +20 [dB\dec] slope and as such getting a 0 [dB\dec] slope at the end.