Source: really comprehensive
I have an Arducam B0497 (USB3 8.3MP) which I want to calibrate using a 7x9 checkerboard that I downloaded at www.calib.io. The size is 7x9 with a Checker Size of 20mm. Because the algorithm counts the interior vertex, the size parameter needs to be passed as 8x6.
- First, I had to check what video stream sources I have on Ubuntu through
ls \dev\video*. It returned something like this:

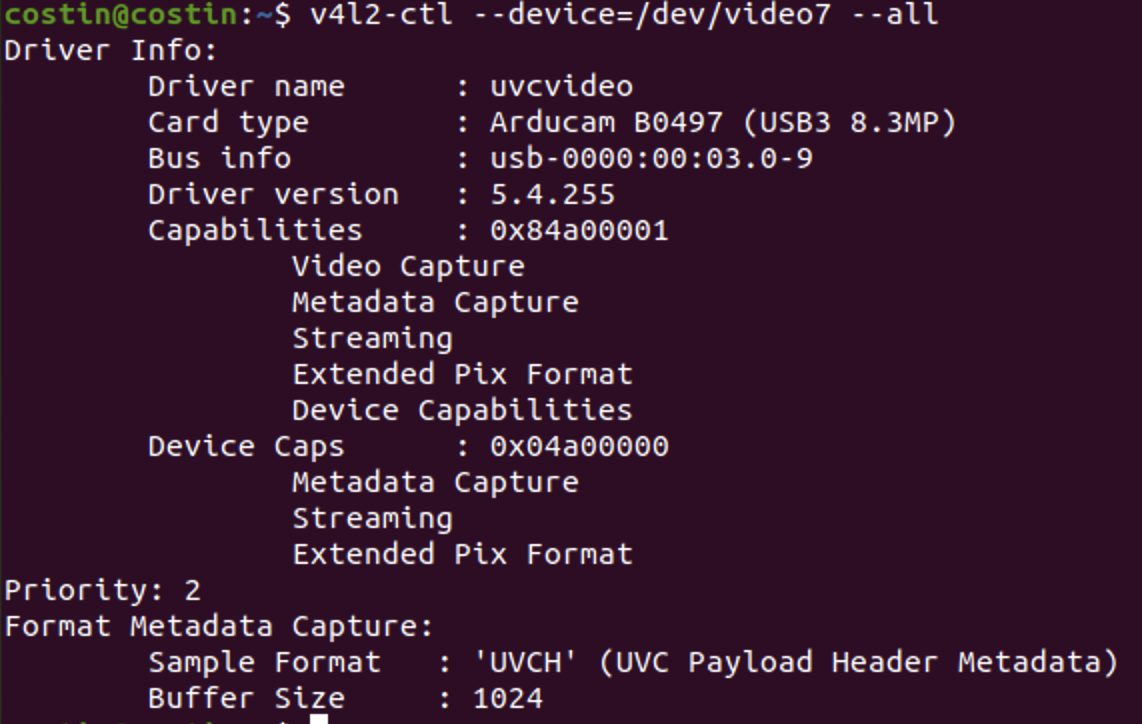
- Second, I call
v4l2-ctl --device=/dev/video4 --allin the terminal to see what device it represents. For example, video 0 and 1 come from my iPhone’s camera, video 2 and 3 come from my MacBook camera, etc.
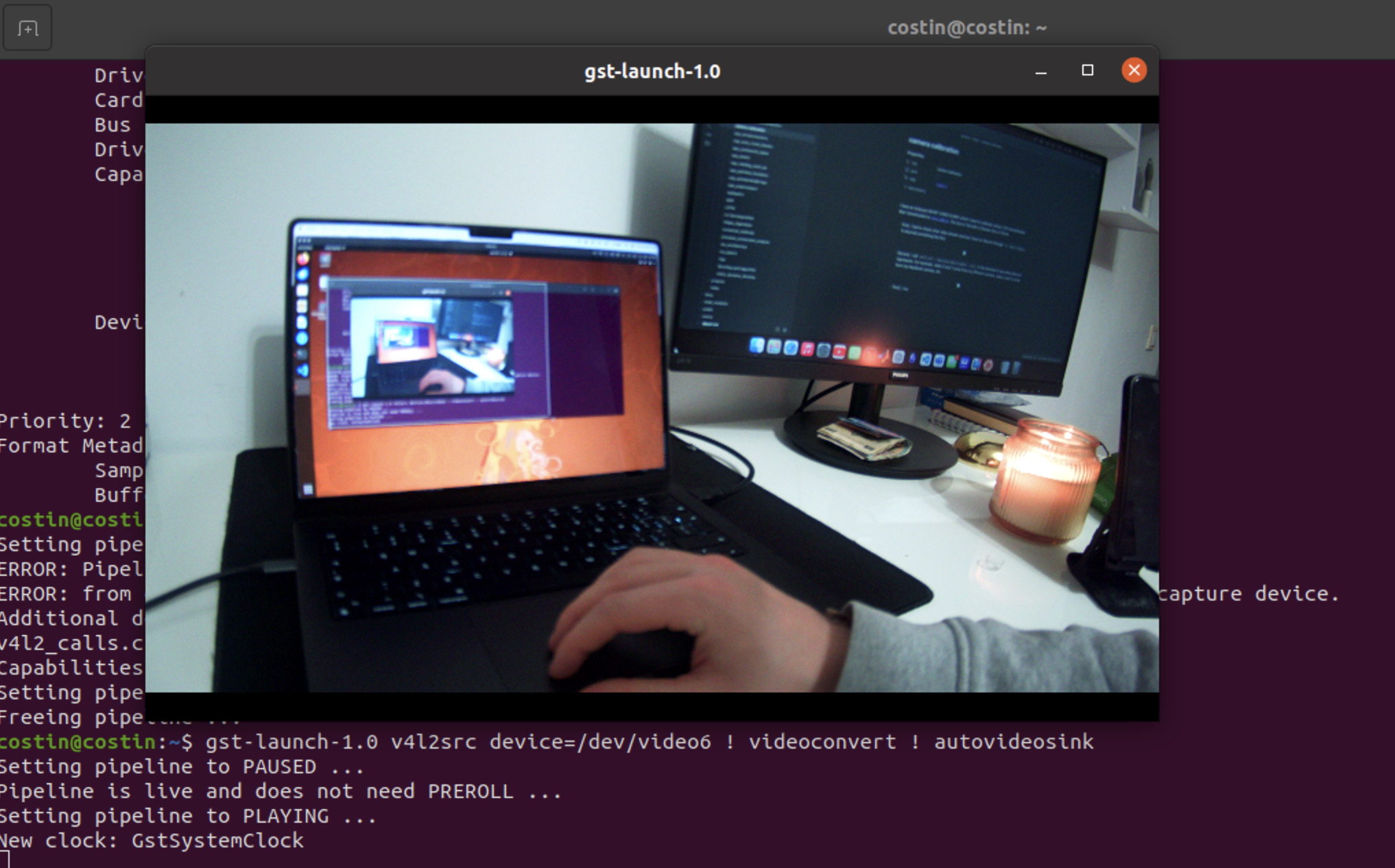
- Third, I run
gst-launch-1.0 v4l2src device=/dev/video4 ! videoconvert ! autovideosinkto check the stream and quality.
- Fourth, I go and modify video_device at
sudo nano /opt/ros/noetic/share/usb_cam/launch/usb_cam-test.launchwith/dev/video6. - Fifth, I open 2 new terminals and I call
roslaunch usb_cam usb_cam-test.launchandrosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.02 image:=/usb_cam/image_raw camera:=/usb_camto run the camera_calibrator ROS package.
Files of interest
Camera settings such as port and resolution are found at
~/opt/ros/noetic/share/usb_cam/launch/usb_cam-test.launchand the final matrices returned by the cameracalibrator.py script can be accessed at~/.ros/camera_info/head_camera.yaml