Backward camera projection maps points from a 2D image plane (captured by a camera) back into the 3D world space
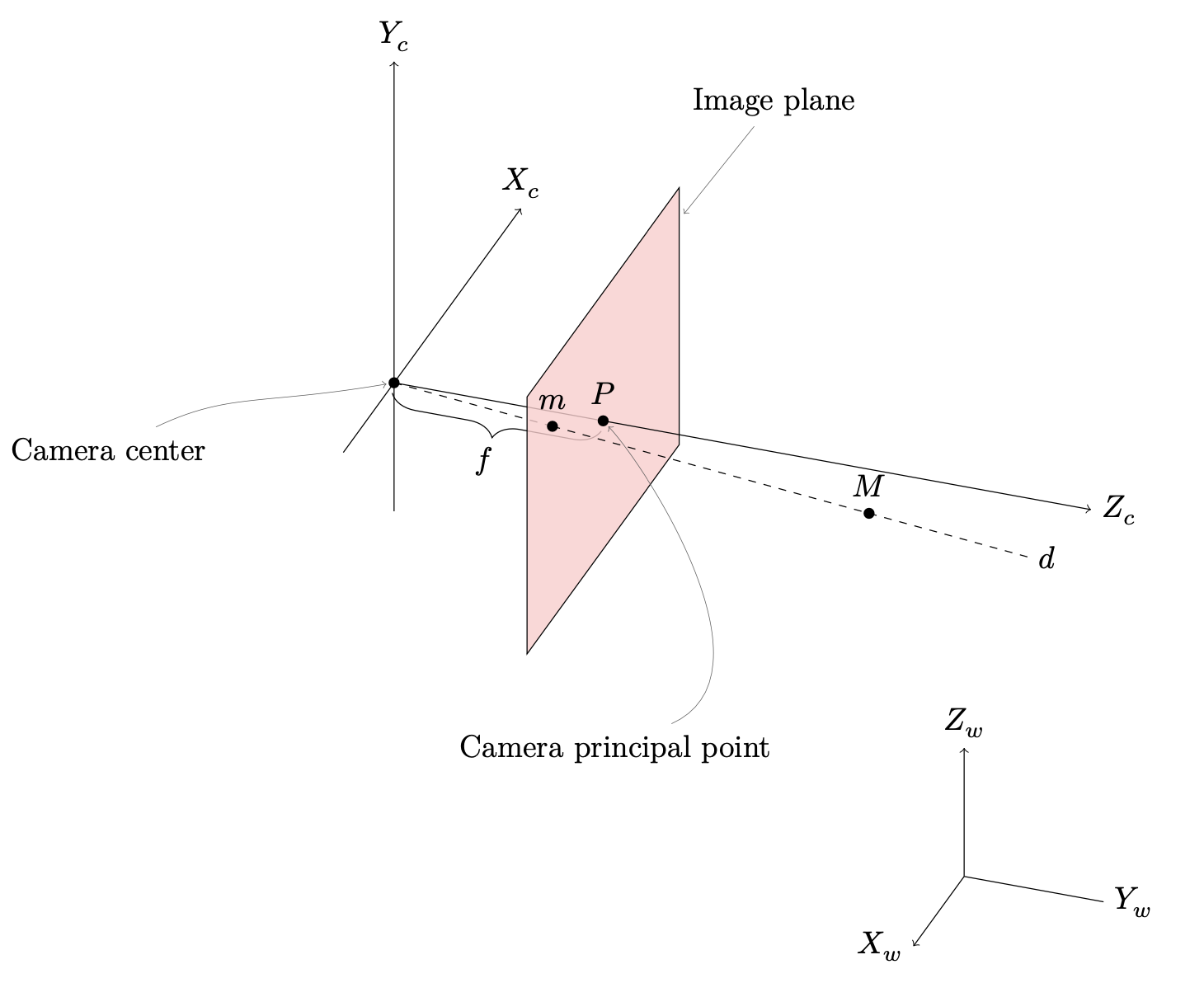
Above is presented the pinhole camera model. The image plane coordinates of the projection m of a point, represented in homogenous world coordinates, can be obtained from the equation below. axes describe the camera reference frame and the axes represent the world reference frame.
where 𝑇 is the transformation between the word reference frame and the camera reference frame, and 𝐾 is the camera intrinsic matrix. The transformation matrix is a 4×4 rotation and translation matrix.
For a CCD camera, the intrinsic matrix has the above general form, where and represent the focal distance 𝑓 expressed in pixel dimensions along the two axes and the pair represent the image plane coordinates of the principal point, also expressed in pixel dimensions.
Due to the projective transformation, given a point in the image, we cannot determine the one point that has produced it, but only a ray on which the original point is found. This is also apparent in First Figure as any point on ray would have produced the same projected point in the image plane. Thus, in order to find the coordinates of a point more information is needed. For example, if it were known that the original point is found on a certain plane, the intersection between the line on which the point is found and said plane will yield the original point.
I have a code that detects and ArUco marker and draws the axis coordinates on the image through rosrun rqt_image_view rqt_image_view /colordetection. Also, by using the presented algorithm, I can detect it’s real-life coordinates.